
随着国民经济的快速发展,储罐数量持续增加,已经成为油气资源及化工物料储备的重大基础性关键设备。与此同时,储罐也在朝着大型化发展,这对储运工程中罐体容积测量提出更高的要求。目前,国内外常用的测量方法包括围尺法、光学参比线法、具导轨光学测量法和三维激光扫描测量法,其中三维激光用于容积测算已为大家所熟知,但大多情况使用的是站式扫描仪,这种仪器具备精度高、密度高、测距远等优势,但也存在效率低、需频繁换站、内业拼接量大等问题。
伴随移动式手持三维激光扫描仪快速发展,为获取储罐丰富的空间信息提供了一种全新的技术手段和方法,其依靠SLAM算法构建连续三维空间点云地图,不需要频繁换站扫描。以牧原集团某大型饲养场内的立式储罐为例

需求:
某大型饲养场为提高管理水平,实现对饲料的动态精准管控,需及时掌握盛放饲料罐体内部的空余体积,为饲料生产、投放计划提供决策辅助。

技术流程:
数据采集-数据预处理-体积计算
数据采集
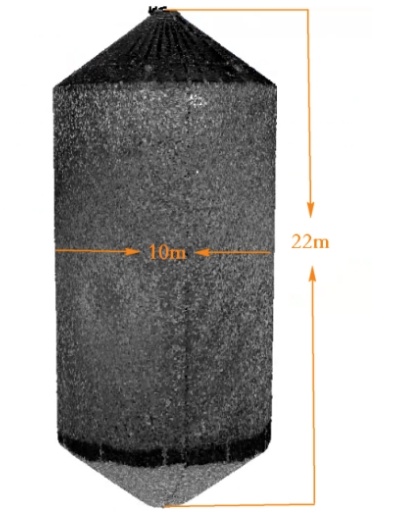
SLAM100最大测距(120m)可覆盖罐体底部到顶部的最大距离(约22m),扫描人员在罐体顶部即可获取罐体内部全貌点云。SLAM100的扫描过程(开机、初始化、扫描、关机)均在罐体外部进行。一个罐体扫描耗时约5分钟,共扫描3个罐体。

数据预处理-点云解算
罐体内部光滑,无明显特征,属于弱特征、弱纹理场景,这给点云匹配带来较大挑战。借助工业级SLAM算法配合严格的匹配阈值降低匹配误差,完成点云解算。点云成果同时具备高精度和高精细度,点云密度均匀,表面平整无噪声,厚度约为1.2cm,这有助于点云封装得到更好、更精确的罐体模型,同时也减少对于模型平滑、降噪的处理次数。单个罐体点云解算耗时约10分钟。
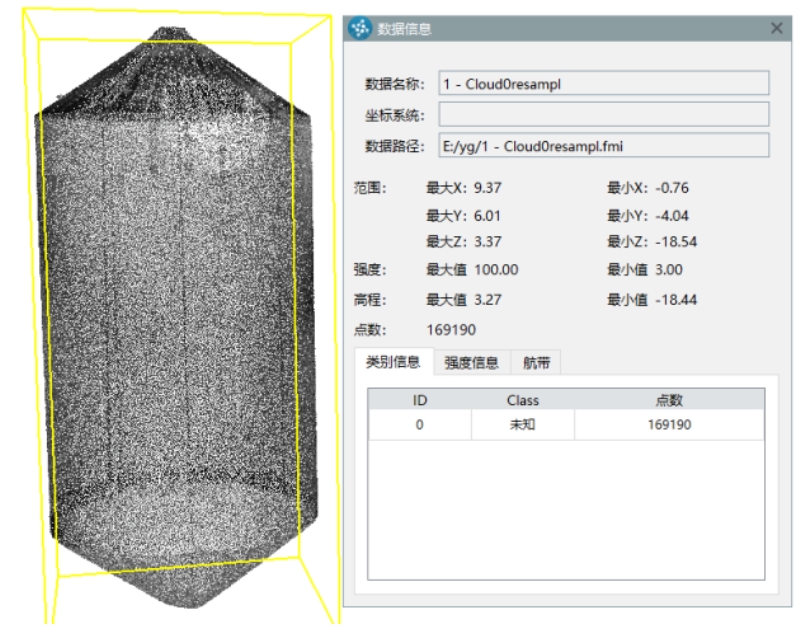
为提高罐体模型后续处理效果,加快模型优化速度,可在保证点云特征形态完整的前提下对点云进行精简。通过对比分析三种常见采样方法的效果(空间距离抽稀、体素抽稀、随机抽稀),选择空间距离采样方法精简点云,经过多次参数调试,最终确定采样距离为0.05m。原始点云数据包含626,6854个点,采样后点云数据包含169,190个点。
体积计算
完整的点云数据有助于罐体模型封装,减少模型漏洞。由于罐体顶部存在开口,可根据其周围的点云数据进行曲面拟合,对罐体进行整体封装,消除模型漏洞。单个罐体模型封装耗时约20分钟。

利用分析工具计算罐体体积。
三个罐体体积分别为1383.62m³、1387.98m³、1396.94m³。经与业主沟通,罐体空载体积为1400m³,由于外业扫描时罐体底部还有少量剩余饲料,因此计算结果均小于1400m³,符合实际情况。
SLAM100在大型罐体容积测量中具有高效、准确的优势,突破了常规测量方式获取单一点位的束缚和不足,避免了站式扫描仪频繁换站和数据拼接问题,可实现罐体快速数字化三维扫描,点云成果精度高、结构完整,通过点云封装能够实现罐体1:1复刻,精确计算罐体容积。